
上海奔普仪器科技有限公司
>> 行业资讯研制超级TCD检测器的关键技术――SRFC-I型超精模糊控制模块
研制超级TCD 检测器 的关键技术
――SRFC-I型超精模糊控制模块
摘要: 国产 TCD低档的根本原因,是 买不来先进精确温控技术,只能采用传统 PID 控制 TCD池温,池温波动难以突破±1%(据专家称,采用PID 控制能够达到100℃±1℃ ),造成信噪比低所至 。采用 SRFC-I 型超精模糊控制模块控制 TCD 池温, 使TCD 性能大幅度提高。
一.问题的提出
不难发现,高档TCD的技术中,大多数技术都可以通过“拿来主义”得到,但有一些技术却买不来,成为限制国产分析仪器进步的枷锁。
我们先来看影响 热导检测器(TCD) 灵敏度的因素:
1. 热导池桥电流(桥电流大,灵敏度高);
2. 热导元件阻值(阻值大,灵敏度高);
3. 热导池气室的孔径(孔径小,峰高检测灵敏度高);
4. 热导池电源(输出阻抗高,灵敏度高);
5. 载气的种类(He、H2轻载气,灵敏度高);
6. 载气的流量(一般载气流量小,灵敏度高);
7. 载气的纯度(载气纯度高,灵敏度高);
8. 工作温度(工作温度低,灵敏度高);
9. 信噪比(信噪比高,灵敏度高)。
在上述影响 TCD 灵敏度的9个因素中,因素1-8是通过“拿来主义”可得到技术;因素9(信噪比)是难以得到的技术。而影响因素9最大的元素是池 温波动 ,它决定了TCD的噪声水平,如 表1 所示 。
表1 影响TCD 信噪比 的 元素
|
影响元素 |
|
噪声值 |
|
桥流产生 热丝温度 变化 |
|
40μV/mA |
|
池 温波动 产生的热丝温度变化 |
|
12400μ v /℃ |
|
载气流量 |
单臂 |
25μV/mL·min |
|
|
双臂 |
7μV/mL·min |
|
池压力 |
单臂 |
17.3μV/kPa |
|
|
双臂 |
1.12μV/kPa |
|
机械冲击(3g物体从2.5cm高处跌落在TCD外壳上) |
|
10μV |
国外知名企业拥有先进精确温控技术,将 TCD 池 温波动 减小到 ±0. 2 ℃ (由于国外知名企业不公开指标,据国内气相色谱专家讲国外知名企业的 TCD 池 温波动 达到 ±0. 2 ℃ )。然而,为了垄断技术获取高额利润,国外知名企业严格封锁了先进精确温控技术,使我国只能生产低档TCD,控制性能只能达到:在过渡过程时间大于5小时的条件下池 温波动 大于 ±1℃ ,在过渡过程时间小于1小时条件下池 温波动 大于 ± 3 ℃ 。国产TCD温控过渡过程时间长,池 温波动 大,导致产品性能复现性很差。不难看出,先进精确温控技术 是研制超级TCD的核心技术。
二. TCD池温低性能的原因
研究表明,采用温场结构、牺牲快速性和PID控制等已经落后技术,是造成国产TCD池温低性能的三大隐性杀手。
1. 温场结构造成不可控噪声
人们对客观世界的认知是有限的,我们还有很多的无奈。比如,传统控制理论只认知了线性控制系统,而对有非线性、时变性和不确定性的工业系统还不甚了了,传统控制面临着严峻的挑战。
传统PID控制只解决了精确控制线性系统问题,还没有解决精确控制有滞后的系统。为了使PID能够控制滞后系统,传统控制通常采用温场结构回避滞后。传统TCD就是通过在TCD外面加一个温场加热炉和测温头紧贴加热器构造的温场结构,如图1所示。
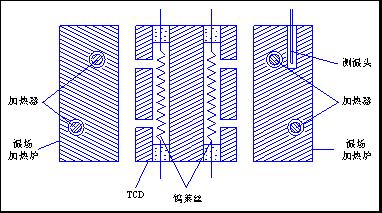
图1 温场结构的 T CD
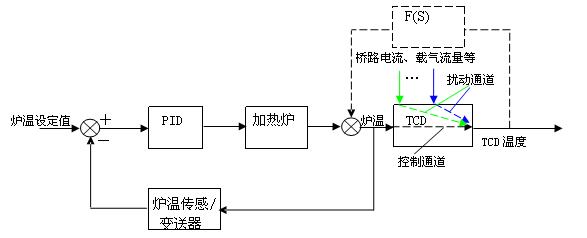
温场结构虽然克服了滞后,使PID能够精确控制温场。但是,由于TCD被置于温场闭环控制系统之外, TCD 内部扰 动 (比如:桥流、载气流量、池压力和机械冲击等)影响了自身恒温也影响了温场的恒温,导致了测量噪声。我们做如下分析:请参见图2, TCD 内部扰 动直接作用到TCD上而导致TCD温度波动,这一变化通过结构内部热传递又反过来影响了炉温,于是炉温控制系统发挥作用维持炉温的恒定。然而,这个炉温的控制精度即便很高并不代表对TCD温度的控制具有同样的动态与静态精度。换言之,对于不同强度的扰动应该有一个与之对应的最佳炉温来克服其产生的TCD温度偏差。另一方面,虽然炉温的反馈控制系统也包含了对各扰动所产生后果的克服,但不难看出控制通道比扰动通道长的多,亦即:扰动对TCD的影响快而有效,而控制作用欲将TCD的受扰状况‘拉’回来,需要经过以下流程:TCD→炉温→PID调节器输出→加热器功率→炉温→TCD,不仅要花费很长时间,而且动态误差不可避免,还可能会有静差。
2. 牺牲快速性制造了中国式顽疾
传统PID也未解决精确控制时变系统的难题,而实际工业系统中又大量存在着时变性,比如,温控系统使用环境的变化就是参数时变。为了使PID能够精确控制时变系统,传统控制采用通常牺牲系统的快速性保证系统的稳定性。
牺牲系统快速性等于失去自动控制的实用性,这是一个基本原则。然而,我国TCD性能测定严重违背了基本原则。国产TCD通常是在理想使用环境条件下(不允许开门窗、不允许人员走动的无干扰环境),采用超常的过渡过程时间(过渡过程时间≥5小时)测定的。这样测定的TCD性能,不仅不能代表TCD实际性能,而且是一种“假”指标。实际应用后,必然发生稳定性、可靠性、灵敏度和重复率等问题。这就是国产分析仪器存在的中国式顽疾(说明书上是高性能指标,实际上是低性能、低稳定性、低可靠性、低灵敏度和低重复率)的内幕。
另外,国产仪器仪表常用温度测量指标(0.1%)冒充控制性能指标,造成用户以为国产仪器仪表的控制性能达到了国际水平,而实际上控制性能比指标低于一到二个数量级,这不仅扰乱了市场,而且毁坏了中国产品的名誉。
3. PID控制TCD池温波动难以突破±1%
传递函数为
的稳定二阶系统的过渡过程有两种收敛形式,即当阻尼比0<ζ<1时是衰减振荡收敛形式和当ζ>1时是无振荡指数收敛形式。推而广之,我们将一般稳定系统的过渡过程也分为两种收敛形式:一是衰减振荡收敛形式,二是无振荡收敛形式。
我们注意到,衰减振荡的系统在过渡过程结束达到静态后是不能继续收敛的 等幅波动 ,为此,我们称此类系统为双边收敛系统。而无振荡收敛的系统(比如指数收敛的系统)在过渡过程结束达到静态后依然继续 单边趋近 ,为此,我们称此类系统为 单边收敛 系统。由于双边收敛系统的静态止步于 等幅波动 ,故双边收敛系统静差较大,而单边收敛系统的静差随着过渡过程时间的增加而减小,逐渐逼近于零,故单边收敛系统静差很小。然而,单边收敛系统存在的致命缺点是丧失了快速性,也就是过渡过程时间很长。
为了兼顾稳、快、准三项性能,传统PID控制一般将系统的过渡过程调整到衰减振荡收敛形式, 最有代表性的是4:1衰减比 衰减振荡 。如上所述, 传统PID控制属于 双边收敛 系统,系统达到静态后止步于 等幅波动 静差较大,实践表明,传统PID控制的控制精度难以突破±1%。同样,采用PID控制的TCD池温波动也难以突破±1%。
问题是,我们能否研制出“不丧失快速性” 的单边收敛系统呢?这样就可以同时提高稳、快、准性能。本文后面谈到的 SRFC― I型 超精模糊控制 模块 采用位置学习算法实现了“不丧失快速性” 的单边收敛系统。
四.SRFC-I型超精模糊控制模块
2007年4月, 北京泛控科技有限公司 应国家气相色谱仪产业化项目和质谱仪产业化项目的邀请, 采用 自主产权的 SRFC― I型 超精模糊控制 模块(简称I型 模块 )控制了 TCD 池 温 ,性能十分优秀,如下:
1. 支撑无温场结构的 TCD
I型 模块 适宜精确控制非线性、时变性和不确定性系统,能够控制无温场TCD。
实验表明,无温场TCD是难控被控对象。首先,滞后与惯性比值大于1:5,PID难于精确控制(即控制波动小于1%)。参见图3,无温场TCD的测温头远离加热器导致 测温滞后较大 ,同时,TCD采用了绝热保温材料使被控对象的 惯性时间较小 ,最终使,系统滞后时间与惯性时间比值较大(1:5),PID控制能控制但难以高精度控制。
其次,无温场TCD的响应快速性与稳定性难以统一。一方面,TCD采用绝热保温材料小功率加热器(3W)就能加热到100℃, 然而,加热时间太长不能满足仪器要求;另一方面,TCD采用大功率加热器(30W),又将发生毁灭性超调,即T发生超调后在绝热材料保温下TCD温度长时间(大于2个小时)不回落。目前,PID控制TCD只能采用牺牲快速性保证稳定性(无超调)的“鲁棒性参数”,牺牲快速性等于牺牲了抗干扰能力,“鲁棒性参数”的PID控制抗干扰能力极低! 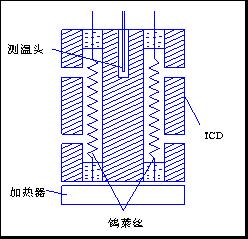 图3 无温场的 T CD
图3 无温场的 T CD
最后,“鲁棒性参数”的PID控制不但不能抵抗无温场TCD的增加了桥流、载气流量、池压力和机械冲击等内部扰 动 ,反而,有增大温度波动的后果。
I型 模块解决了控制 无温场 TCD 的难题,实现了下述性能:30W功率高速无超调升温,过渡过程时间小于40分钟(PID控制TCD的过渡过程时间为300分钟);测温头安装在离钨铼丝最近的位置(参见图3),提高抵抗 TCD 内部干扰能力,大幅度提高 TCD 信噪比;
2. 支撑高性能
I型 模块采用函数化模糊推理和位置学习的方法, 实现单边收敛(即在过渡过程结束达到静态后依然继续 单边趋近 ),是最先进控制器。 I型 模块采用的函数化模糊推理是一种自主创新的模糊推理算法,其核心进步是发现模糊推理函数化方法,解决了运算速度低和性能调整复杂的难题。 I型 模块采用的位置学习也是一种自主创新的控制算法,其核心进步是解决了消除静差时破坏系统动态稳定性的难题, 实现单边收敛 。
I型 模块控制 TCD 的性能如下: 在过渡过程时间35分钟条件下,池 温波动 00 ℃ 小于 ±0.0 5 ℃ (欢迎同仁交流竞赛) 。
五.结论
1. 国产TCD采用PID控制系统静差止步于 等幅波动 不可能太小。
2. TCD的温场结构不能抵抗TCD内部干扰, 造成不可控噪声 。
3. PID控制采用牺牲快速性控制时变系统的方法抗干扰能力很低,造成仪器 低稳定性、低可靠性、低灵敏度和低重复率 。
4. SRFC― I型 超精模糊控制 模块可以控制无温场结构的TCD,在恒温控制 TCD温池的同时克服了 TCD内部干扰,降低了噪声。
5. SRFC― I型 超精模糊控制 模块算法先进 ,控制TCD的抗干扰能力强,池温波动100 ℃ 小于 ±0. 05 ℃ 。
研究作者:樊远征
200 8年3月17日
单位: 北京泛控科技有限公司
地址: 北京市海淀区翠微路 2 号 7 楼 408 室(邮编: 100036 )。
联系人: 高小艳
联系电话: 010- 86842988 , 13701372187 , 010-63358841
Email : cb3lp@yahoo.com.cn
- ・铁岭市公安局交通警察支队购置移动高清测速仪询价采购
- ・梅特勒-托利多分析仪器在石油化工行业的应用
- ・表面光洁度与表面粗糙度参数换算表
- ・时代涂层测厚仪在使用中的常见问题分析
- ・直流稳压电源工作原理
- ・硬度计的应用领域分类
- ・影响涂层测厚仪测量准确度常见情况分析
- ・各种表面的粗糙度值参考(RA参数)
- ・宣州区农委检测设备采购招标公告
- ・铁岭县交警大队多项举措全面做好高温天气道路交通安全
- ・气体检测仪传感器种类及优缺点的浅析
- ・红外线测温仪在诊断设备故障中的应用
- ・如何选择红外热像仪
- ・气体检测仪在矿井下的运用
- ・粗糙度仪广泛应用
- ・如何使用万用表测量电流
- ・PH电极支架如何使用
- ・奥豪斯Adventurer™ AX系列
- ・电子天平的校准
- ・涂层测厚仪在电梯行业中的应用
- 目前还没有同类品牌商品!
- ・仪器仪表的故障诊断方法
- ・HRC洛氏硬度计的测量原理是什么
- ・温度传感器的应用及原理
- ・黑龙江森林植物园在我司购买梅特勒电子天平ME204
- ・我国仪器仪表行业投资分析及前景预测
- ・海洋仪器仪表研究所助推海洋强国梦
- ・2014年国产高端仪器设备国外受欢迎
- ・全球塑料机械整体需求分析
- ・国际企业“图谋”我国基层医疗器械市场
- ・艾默生推出1/2英寸67D系列仪器用调压器
- ・日立开发出毫米波雷达绝对速度传感器技术
- ・世卫预计6月底可做好生产甲型H1N1流感疫苗准备
- ・行李缠绕机简介
- ・仪器仪表行业本身的特点是导致发展缓慢的原因之一
- ・纯水器市场需求和购买率保持逐年上升势头
- ・湖北对基因检测行业全面监管
- ・国内电工仪器仪表产品市场透析
- ・安捷伦与成都前锋合作化解合资风险
- ・高光谱与高空间集成研究通过验收
- ・世界首台超高分辨率光电子能谱仪研制成功
- ・2014年国产高端仪器设备国外受欢迎
- ・全球塑料机械整体需求分析
- ・国际企业“图谋”我国基层医疗器械市场
- ・艾默生推出1/2英寸67D系列仪器用调压器
- ・日立开发出毫米波雷达绝对速度传感器技术
- ・世卫预计6月底可做好生产甲型H1N1流感疫苗准备
- ・行李缠绕机简介
- ・仪器仪表行业本身的特点是导致发展缓慢的原因之一
- ・纯水器市场需求和购买率保持逐年上升势头
- ・湖北对基因检测行业全面监管
- ・国内电工仪器仪表产品市场透析
- ・安捷伦与成都前锋合作化解合资风险
- ・高光谱与高空间集成研究通过验收
- ・世界首台超高分辨率光电子能谱仪研制成功
- ・2005年起香港仪器仪表分批实行零关税
- ・精确预计流动分叉获得新理论途径
- ・仪器仪表发展简史与现代社会的密切关系
- ・中科院光电所生物芯片仪器研发水平稳步提升
- ・仪器仪表行业应加强技术方面的投资力度
- ・制造业景气度排行 仪器仪表列第二
| 公司重点推荐仪器: | ||||
| 雷达测速仪 | 涂层测厚仪 | 粗糙度仪 | 硬度计 | 激光测距仪 |
| 电子天平 | 噪音计 | 照度计 | 风速计 | 温湿度计 |
| 超声波测厚仪 | 紫外线灯 | 频闪仪 | 测振仪 | 红外热像仪 |
| 直流稳压电源 | 安规测试仪 | 转速表 | 示波器 | LCR测试仪 |
| 信号发生器 | 万用表 | 兆欧表 | 相序表 | 耐压测试仪 |
| 酸度计 | 电导率仪 | 推拉力计 | 浊度仪 | 卤素检漏仪 |
| 接地电阻测试仪 | 红外测温仪 | 钳形表 | 溶氧仪 | 电火花检测仪 |
| 公司重点推荐仪器厂家品牌: | ||||
| 日本万用 | 美国雷泰 | 美国蒙拿多 | 时代集团 | 意大利哈纳仪器 |
| 日本理音 | 美国泰克 | 美国GE | 美国FLIR | 德国菲希尔 |
| 日本共立 | 美国Dakota | 台湾泰仕 | 瑞士徕卡 | 德国尼克斯 |
| 日本日置 | 美国斯德克 | 台湾群特 | 德国KK | 梅特勒-托利多 |
| 日本新宝 | 美国福禄克 | 台湾固纬 | 美国路阳 | 美国奥豪斯OHAUS |
| 日本加野麦克斯 | 美国安捷伦 | 台湾先弛 | 香港CEM | 德国赛多利斯 |
| 德国德图 | 美国英思科 | 台湾一诺 | 台湾衡欣 | 常州同惠 |

客服邮箱:tech17@126.com 客服电话:021-31266107 邮政编码:201199
公司地址:上海市沁春路1366弄38号803室 网站地址:www.17360.cn
Copyright © 2005-2014 上海奔普仪器科技有限公司 All Rights Reserved.
网站备案:沪ICP备05008086号